

HFI人工智能社
2021.05.30
社团名称:
华附国际部人工智能社 / HFI Artificial Intelligence Club (HFIA.I.)
社团介绍:
华南师范大学附属中学国际部A.I.人工智能社旨在让同学们共同了解、学习、参与人工智能活动,学习编程设计,搭建创意机器人,了解语音图像识别技术,参与具体人工智能项目,在活动中进一步学习与探索人工智能这一领域。
HFI Artificial Intelligence Club (HFIA.I.) aim to provide an opportunity for students to participate in AI projects, study program designs, build competition robots, and learn about newest development of artificial intelligence. This is a platform for competition, communication, and collaboration in the field of artificial intelligence.
公众号:
HFI人工智能社(HFI_AI)
2020-2021学年社长/副社长:龙雨轩Maverick,刘付孟展John
2019-2020学年社长/副社长:雷岷锟Minkun,张宇骞Bruce
2018-2019学年社长副社长:吴世悠Tony,李思宇Tammy,
2017-2018学年社长副社长:黄之国Jonathan(Shaw),孙雨璇Johanna(Heaney)
2020-2021学年社团活动:
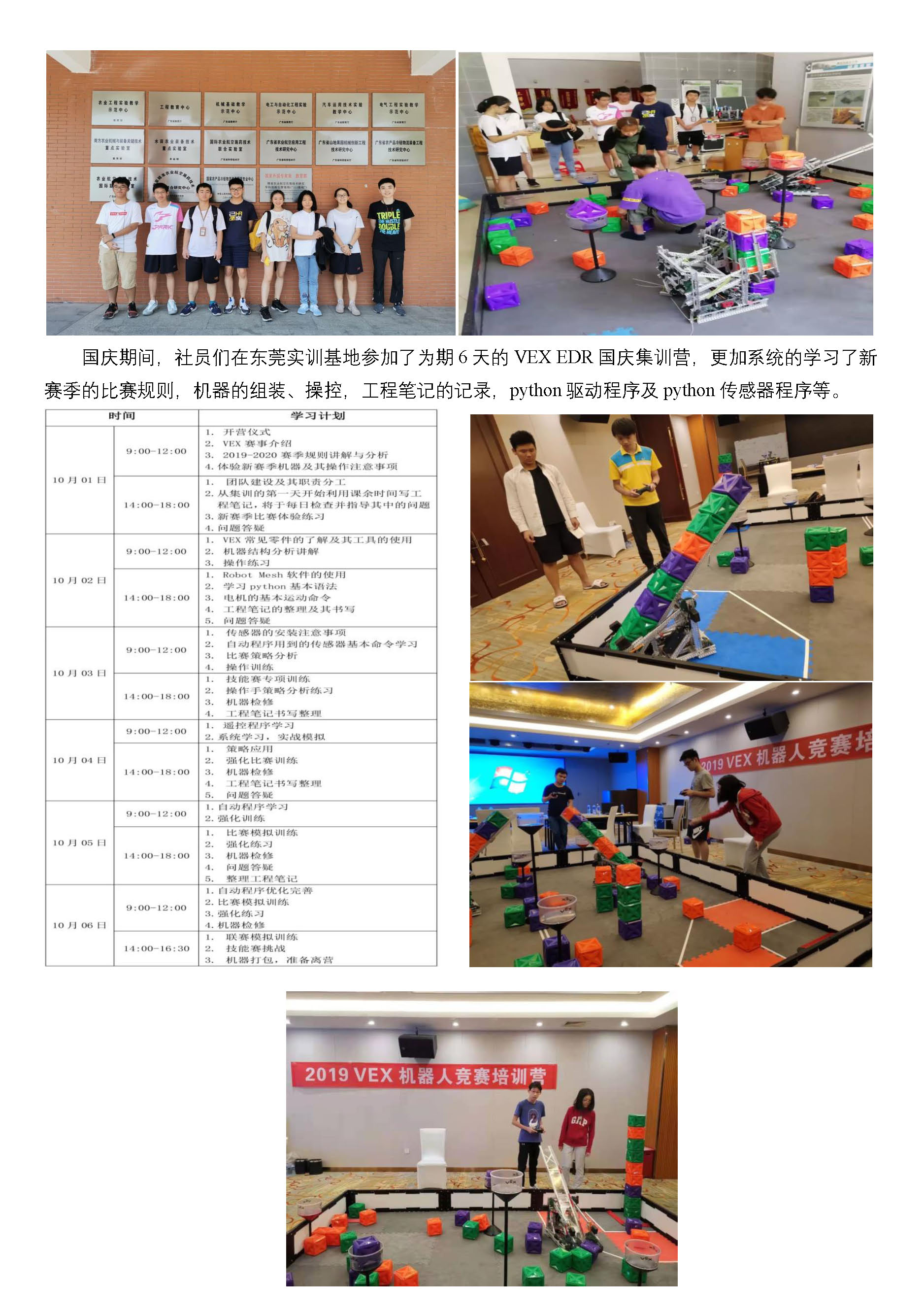
8-10月活动总结:
Summary of August through October:
9月初招开了一次AI社竞赛体验活动,邀请到了VEX和WRC比赛的老师前来指导。
经过社团讨论和慎重考虑,社团内一致认为,因今年疫情原因和团队内部出现问题,不宜再组队并外出培训、参赛。因此,目前AI社活动将转为小规模的、公开的深度学习课程,作为疫情期间的一个新的尝试。课件还在准备中。
In early September, we held a trial lesson of robotics competitions (VEX and WRC AI), and we invited a professional robotics teacher to guide the new club members.
After careful discussion and consideration, the club members agreed: due to the coronavirus and the failure of cooperation among members, it would not be a good choice to continue going out to training and competitions. Therefore, AI club will instead be working on in-school public deep-learning training courses. The class materials are still in preparation.
11月
预计11月中旬开展AI社深度学习课程。
We would open the deep learning class at about November 19th.
2019-2020学年社团总结:





2018-2019学年活动列表:
HFI人工智能社活动报告
HFI AI Club Monthly Report
1,VEX赛事准备
活动1:介绍VEX竞赛新赛季规则
时间:9月3日
地点:社团开放日展位
内容:在社团开放日的展位上展览社团入围2017-2018赛季VEX 竞赛世界锦标赛时的机器,并且展示VEX新赛季(2018-2019)规则 “攻城易帜”
Activity 1 : Introductory to the rule of VEX Robotics Competition
Time: 2017.09.03
Place: Club Fair stand
Content: Exhibition of the robot we used during VEX Robotics 2017-2018 World Championship in Louisville, Kentucky, and video demonstration of the new season (VEX Robotics Competition 2018-2019) rule “Turing Point”
活动2:组织新社员参观VEX训练场
时间:9月9日
地点:华农训练场地
内容:组织有意向参加VEX竞赛的新社员前往华南农业大学机械工程学院的训练场地参观VEX 2018-2019赛季的场地以及机器。新社员体验操作机器以及初步接触如何完成比赛任务。
Activity 2 : Introductory to the rule of VEX Robotics Competition
Time: 2017.09.09
Place: SCAU practice field
Content: Students who intend to participate in VEX Robotics Competition pay a visit to the VEX robot practice field at South China Agricultural University. During the visit, they visited the competition platform and experienced operating robots to score based on the new season’s rule.

活动3:国庆节西安特训营开始
时间:9月29日
地点:西安
内容:为了准备VEX竞赛,新队员们利用国庆假期的时间参加9月29日开始的特训营,学习VEX编程语言Robot C并且接受与机器直接交互的实战训练。
Activity 3: VEX Camp
Time: 2018.09.29
Place: Xi’an
Content: To prepare for the VEX competition, the new players took advantage of the National Day holiday to attend a special training camp that began on September 29, to learn the VEX programming language Robot C and to undergo real-time training in direct interaction with machines.
2.C语言编程入门讲座
讲座1:C语言编程基本介绍
时间:9.14
地点:203教室
内容:介绍C语言编程的基本原则,包括C语言的基本语法单位、符号、数据类型、标识符等,初步了解C语言的基本构架。
Lecture1: Introduction to C Programming language
Time: 2018.9.14
Place: room 203
Content: introducing the basic principles of C language programming, including basic syntactic units, symbols, data types, identifiers and so on, and preliminarily understands the basic framework of C language.
讲座2:C语言编程基本介绍
时间:9.19
地点:Istudy 2号会议室
内容:学习C语言中的数学符号、逻辑符号、以及不同类型数据的使用规则,以及基本函数的使用。
Lecture2: Introduction to C Programming language
Time: 2018.9.19
Place: Istudy
Content: Learn about mathematical symbols, logical symbols, rules for using different types of data, and the use of basic functions.
讲座3:C语言基本逻辑语句
时间:9.21
地点:Istudy会议室
内容:介绍C语言编程的逻辑语句,讲解具体地if else逻辑使用,以及相应的语法规则。
Lecture 3: Basic boolean logic in C programming language
Time: 2018.9.21
Place: Istudy
Content: This lecture introduces the logic statements of C language programming, explains the specific use of if else logic, and the corresponding syntax rules.
讲座4:C语言循环语句
时间:9.24
地点:203
内容:介绍C语言编程的循环语句,讲解具体地while loop逻辑使用,以及相应的语法规则。
Lecture 4: Basic use of loop in C programming language
Time: 2018.9.24
Place: 203
Content: This lecture introduces the loop statements of C language programming, explains the specific use of loop logic, and the corresponding syntax rules.

3、国庆节期间,人工智能社派出的VEX参赛队伍的队员参加了在西安举行的EDR认证+竞赛营课程。
课程第1天
时间:9月28日
地点:西安乐博士培训基地
内容:对工程的基本介绍,以及Robot C语言控制机器移动的基本语句介绍,包括电机函数、等待函数、以及机器人转弯的不同类型。
课程第2天
时间:9月29日
地点:西安乐博士培训基地
内容:如何绘制程序的流程图,Robot C 语言中while语句的使用、轴交编码器与声呐传感器的功能和使用,以及程序中变量的种类。
课程第3天
时间:9月30日
地点:西安乐博士培训基地
内容:如何使用判断逻辑编写程序,如何自定义函数,如何在复杂的程序中使用多任务结构以及如何利用LCD显示屏进行辅助。
课程第4天
时间:10月1日
地点:西安乐博士培训基地
内容:对所有此前未讲的VEX传感器的功能介绍,包括触碰传感器、亮度传感器、陀螺仪、计时器和旋转测量仪;此外,对遥控器程序的编写也进行了介绍。
课程第5天
时间:10月2日
地点:西安乐博士培训基地
内容:阈值的使用以及如何编写巡线、数线的程序。

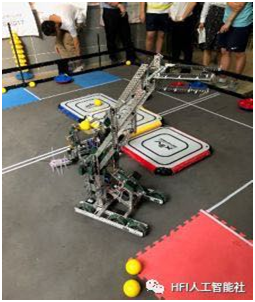
4、VEX赛事+训练
活动1:VEX厦门分区赛
时间:11月18日
地点:厦门
内容:
“我们于11月17日到达厦门。我们在酒店检修了机器人,把它的每个松动的螺丝都拧紧。程序员们把代码输到竞赛模板里,并将它们收集到一个文件中。接下来就是给电池充电,补充工程笔记。
第二天,比赛开始了。一开始是练习时间和技能赛。我们没来得及参加技能赛,因为它很早就截止了。由于赛场上到处是机器人,我们的自动程序也没赶得上调。机器人在训练时很正常,但它一连场控就经常过载,让我们一连输了四场比赛。它的爪子很脆弱,手臂几乎没用。凭借未经调整的自主程序和笨拙机器人,我们最终在19支队伍中排名第14。
赛后,我们总结出:机器人需要滚筒及时收球,也应换更轻的手臂把碟盖挂到杆子上。希望下次比赛能有更好的结果”

活动2:电机排线
时间:11月23日
地点:华农训练场地
内容:
“11月23日,我们在华南农业大学(SCAU)的训练地点重新安排了马达的端口。在此之前,我们的6个车轮马达中有2个连载功率扩展器上,让它们很容易过载。我们把它们和机械臂上电机的端口交换,但是电线插错了,让我们花了很长时间弄明白程序里设置的左电机是怎么变成右电机的。再次交换端口并调整设置调整后,轮子终于正确地转了起来”

活动3:改装机器
时间:12月25日-12月31日
地点:华农训练场
内容:
“在之前的比赛中看到其他队伍的机器后,我们决定淘汰巨大的机械臂和爪子,然后滚筒以及由链传动的机械臂。第一天是最艰难的一天 – 所有的队员都到了,结果大家发现只能几个人同时修改机器,所以很多人都闲着。接下来的几天,我们实行“三班倒”制度。最后,我们为新机器人写了手动程序使它终于能快速收球。但是它的机械臂还是太重,举不起来,为此我们在它的关节处安装了齿轮改变传动比。现在,机器人的爪子仍然太脆弱,但还有改进的余地 ”。
5、亚洲公开赛
我校人工智能社派出7名高一同学组成51140A队 ,参加了在宁波举行的VEX机器人亚洲公开赛,获得了线上挑战赛高中组第一名,和综合评比一等奖。
6、参加学校国际日慈善义卖活动。
2019年2月,社团成员设计了玉兔车售货机器人,在国际日活动中用于售卖椰子等活动商品,共计为活动筹集善款13000余元。

7、2019年5月,召开社团会议。
会议中交流AI领域的最新资讯;高三部分社员向其他社员介绍参加AI社团活动对大学申请的影响,以及其它相关经验分享。

2016-2017学年活动列表:
1、2016年9月14日 乐博士公司创始人施宏伟先生来到华附国际部,做了人工智能与机器人比赛的专场讲座。
2、2016年9月30日到10月7日,人工智能社全体成员在西安乐博士公司开展为期八天的VEX机器人竞赛培训营,既对VEX机器人搭建以及VEX竞赛有了系统深入的学习,又从团队合作和搭建实践中汲取乐趣。乐博士(中国)的金牌机器人教育专家外教Steve为大家介绍VEX赛事,STEM教育项目,工程流程,项目建设,团队建设等。 队员们完成了本赛季参赛机器人原型机的搭建 。
3、2016年10月29日香HFI人工智能社应邀参加2016年VEX机器人中国赛区香港公开赛,本次比赛由IFI主办,在香港国际学校浅水湾校区举办,来自香港、天津、广州、深圳等四地共20支队伍参加了比赛HFI VEX 机器人队伍以小组赛第一名出线,并获得手动赛冠军。
4、2016年12月23日至25日在西安举行的中国公开赛的比赛中,与来自全国各区域赛晋级的上百支队伍进行交流和竞技,HFI队伍夺得Design Award 和Energy Award,并获得联赛8强和技能赛高中组全国第三的好成绩。
5、2016年12月26日参观西安高新区工业机器人展和参观创客空间。
6、2016年12月27日至2017年1月1日,社团的七位同学在西安乐博士公司参加卡耐基梅隆大学ROBOTC程序员培训营和认证考试,其中孙雨璇和林奕康两位同学获得高级程序员证书,加上黄之国和王黎洋同学,共有四位社团成员先后获得了卡耐基梅隆大学颁发的ROBOTC高级程序员证书,其余参加培训的同学都获得了ROBOTC程序员证书。
7、2017年2月1日至2月7日社团进行了了七天寒假集训,为亚洲公开赛做准备,并邀请乐博士的苏建林教练莅临广州,为比赛队伍进行两天的现场指导。
8、2017年2月日在北京举办的亚洲公开赛中,HFI人工智能社斩获了技能赛第二名、最佳设计奖,以及亚洲公开赛高中组最高奖项EXCELLENCE AWARD。并获得晋级本2016-2017赛季世界锦标赛的参赛资格。
9、2017年4月21日-4月23日HF I人工智能社的同学们在美国路易斯维尔参加了VEX EDR高中组的比赛,获得COMMUNITY AWARD。
10、2017年5月16日开始社团开展为高一新生分享学习经验的活动,请在校的三个年级的优秀同学总结学习经验,集结成册,其中AP和其他标准化考试的学习经验,也可以为在读的高一同学提供很大的参考和帮助。并且以学习手册为基础,计划开展学校太阳能改造计划环保众筹活动,凡是支持众筹活动的同学都赠送一本学习手册。学习手册已经在新生宣讲会时进行众筹,目前已经发出137本,筹到金额都将在学校进行环保改造工程。
总结:上学年我社活动主要集中在VEX机器人比赛项目上,同时也积极为社区做贡献,为同学们收集总结了学习经验,制作了学习手册。今年我社将会在机器人比赛的基础上开展一系列人工智能研究项目或讲座,多方向发展社团活动,扩大活动规模,为更多的同学提供人工智能领域学习和交流的平台。
HFI人工智能社活动报告(10月-12月)
HFI AI Club Monthly Report (October to December)
VEX – EDR camp 2018
国庆节期间,人工智能社派出的VEX参赛队伍的队员参加了在西安举行的EDR认证+竞赛营课程。
From September 28th, 2018 to October 7th, 2018, team members from the VEX teams of HFI AI Club attended courses at VEX EDR recognition + competition preparation camp in Xi’an.
课程第1天
时间:9月28日
地点:西安乐博士培训基地
内容:对工程的基本介绍,以及Robot C语言控制机器移动的基本语句介绍,包括电机函数、等待函数、以及机器人转弯的不同类型。
Day 1
Date: September 28th
Location: Robot C Academy, Xi’an
Lecture Content: basic introduction to engineering, introduction to fundamental commands and functions in Robot C language, including “motor” function, “sleep” function, and different types of robot turns.
课程第2天
时间:9月29日
地点:西安乐博士培训基地
内容:如何绘制程序的流程图,Robot C 语言中while语句的使用、轴交编码器与声呐传感器的功能和使用,以及程序中变量的种类。
Day 2
Date: September 29th
Location: Robot C Academy, Xi’an
Lecture Content: how to make a flowchart before writing codes, and use of while loop, the utility of encoders and sonar sensors, and five types of variables in Robot C language.
课程第3天
时间:9月30日
地点:西安乐博士培训基地
内容:如何使用判断逻辑编写程序,如何自定义函数,如何在复杂的程序中使用多任务结构以及如何利用LCD显示屏进行辅助。
Day 3
Date: September 30th
Location: Robot C Academy, Xi’an
Lecture Content: introduction to Boolean logic, how to define functions, how to incorporate multi-tasking into a complicated program, and how to use LCD screen as an auxiliary tool.
课程第4天
时间:10月1日
地点:西安乐博士培训基地
内容:对所有此前未讲的VEX传感器的功能介绍,包括触碰传感器、亮度传感器、陀螺仪、计时器和旋转测量仪;此外,对遥控器程序的编写也进行了介绍。
Day 4
Date: October 1st
Location: Robot C Academy, Xi’an
Lecture Content: introduction to sensors that are not involved in previous lectures, including touch sensor, light sensor, gyroscope, timer, and potentiometer.
课程第5天
时间:10月2日
地点:西安乐博士培训基地
内容:阈值的使用以及如何编写巡线、数线的程序。
Day 5
Date: October 5th
Location: Robot C Academy, Xi’an
Lecture Content: How to establish and use thresholds when writing a line-tracking or line-counting program.

VEX赛事+训练
活动1:VEX厦门分区赛
时间:11月18日
地点:厦门
内容:
“我们于11月17日到达厦门。我们在酒店检修了机器人,把它的每个松动的螺丝都拧紧。程序员们把代码输到竞赛模板里,并将它们收集到一个文件中。接下来就是给电池充电,补充工程笔记。
第二天,比赛开始了。一开始是练习时间和技能赛。我们没来得及参加技能赛,因为它很早就截止了。由于赛场上到处是机器人,我们的自动程序也没赶得上调。机器人在训练时很正常,但它一连场控就经常过载,让我们一连输了四场比赛。它的爪子很脆弱,手臂几乎没用。凭借未经调整的自主程序和笨拙机器人,我们最终在19支队伍中排名第14。
赛后,我们总结出:机器人需要滚筒及时收球,也应换更轻的手臂把碟盖挂到杆子上。希望下次比赛能有更好的结果”
Activity 1 : VEX Xiamen Championship
Time: 2018.11.18
Place: Xiamen
Content:
“We arrived in Xiamen on 17th November. At the hotel, we examined our robot, fastening each of its loosen screws after the one-hour flight. The programmers fitted their codes into competition format and gathered them up in one single file. Batteries were charged, and several pages of engineering notes were added to the notebook.
The competition began the next day. Before the matches was practice time and skills competitions. We did not have the chance for the latter, as it has closed before our turn came. We did not adjust the autonomous programs either, as the field was filled with robots. Even though our robot seemed to work well during practice time, it frequently overloaded when connected to the competition controller, rendering us defeated in four out of five matches. The claw of our robot proved to be too fragile, and the arms barely useful. With our unadjusted autonomous programs and our “dumb” robot, we ended up coming 15th out of 19 teams.
We evaluated, after the competition, that our robot needed rollers to collect balls in a timely manner, as well as lighter arms to carry disks to the poles. Hopefully, the next competition would bear better results.”

活动2:电机排线
时间:11月23日
地点:华农训练场地
内容:
“11月23日,我们在华南农业大学(SCAU)的训练地点重新安排了马达的端口。在此之前,我们的6个车轮马达中有2个连载功率扩展器上,让它们很容易过载。我们把它们和机械臂上电机的端口交换,但是电线插错了,让我们花了很长时间弄明白程序里设置的左电机是怎么变成右电机的。再次交换端口并调整设置调整后,轮子终于正确地转了起来”
Activity 2 : upgrading the robot’s motor system
Time: 2018.11.23
Place: SCAU practice field
Content:
On 23rd November, we rearranged the ports for the motors in our training place in South China Agricultural University (SCAU). Before, two of our six motors for the wheels are connected to the power expander, which makes them overload easily. We swapped their ports with those of the arm motors. Unfortunately, the wires have been plugged incorrectly, and for a long time we were confused by how the original left motors defined in Robot C became the right ones. After swapping the ports again and making minor adjustments in the settings, the wheels finally spin correctly.
活动3:改装机器
时间:12月25日-12月31日
地点:华农训练场
内容:
“在之前的比赛中看到其他队伍的机器后,我们决定淘汰巨大的机械臂和爪子,然后滚筒以及由链传动的机械臂。第一天是最艰难的一天 – 所有的队员都到了,结果大家发现只能几个人同时修改机器,所以很多人都闲着。接下来的几天,我们实行“三班倒”制度。最后,我们为新机器人写了手动程序使它终于能快速收球。但是它的机械臂还是太重,举不起来,为此我们在它的关节处安装了齿轮改变传动比。现在,机器人的爪子仍然太脆弱,但还有改进的余地 ”。
Activity 3: robot refinement
Time: 2018.12.25-2018.12.31
Place: SCAU practice field
Content: From 25th to 31st December, we went to SCAU to refine our robot. After seeing other teams’ machines in our previous competition, we decided to eliminate the giant arms and claw, install rollers and chain-driven arms. The first day was the hardest day, when everyone there only to find that only three or four people are needed simultaneously. The following days, then, we rotated on three shifts. On the last day, we wrote the manual program for our new robot, which was finally able to collect balls quickly. However, its arms were still too heavy to lift, so we used gears at their joints. Now, the only problem of the robot was its claw – still too fragile but can be fixed.

2017-2018学年活动列表:
HFI人工智能社VEX机器人香港公开赛获“最佳设计奖”| 激战香江,初试牛刀
喜报| HFI人工智能社勇夺VEX机器人亚洲公开赛最高荣誉“全能奖”等四奖项




